光场
基本思想,用平面来模拟人眼实际看到三维空间
全光函数
通过函数的形式来描述所有光线信息
引入两个参数来描述光线的位置信息,得到一张灰度图 
,加入光的波长,得到色彩信息 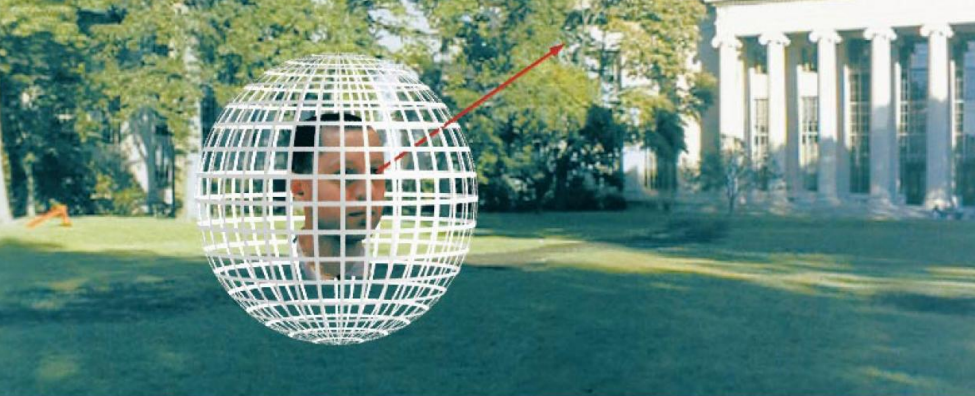
引入时间 最后引入自己的位置,代表整个世界中的光线分布 
对于这个七维的函数,可以表示任何地方,任何方向,任何时间看到的东西的颜色,这就是全光函数
光线
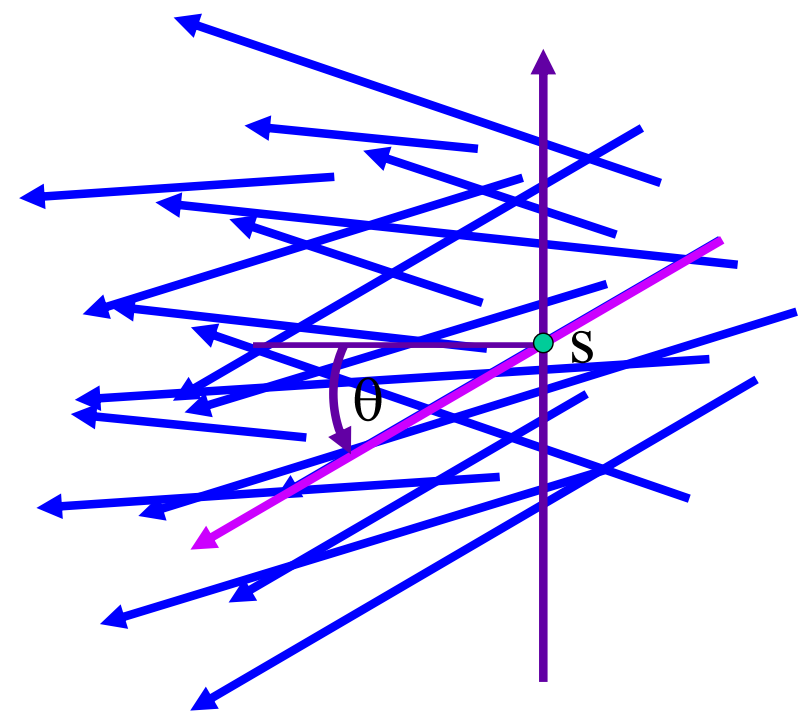
光线具有起点和方向,定义为

也可以用两个点来定义
光场
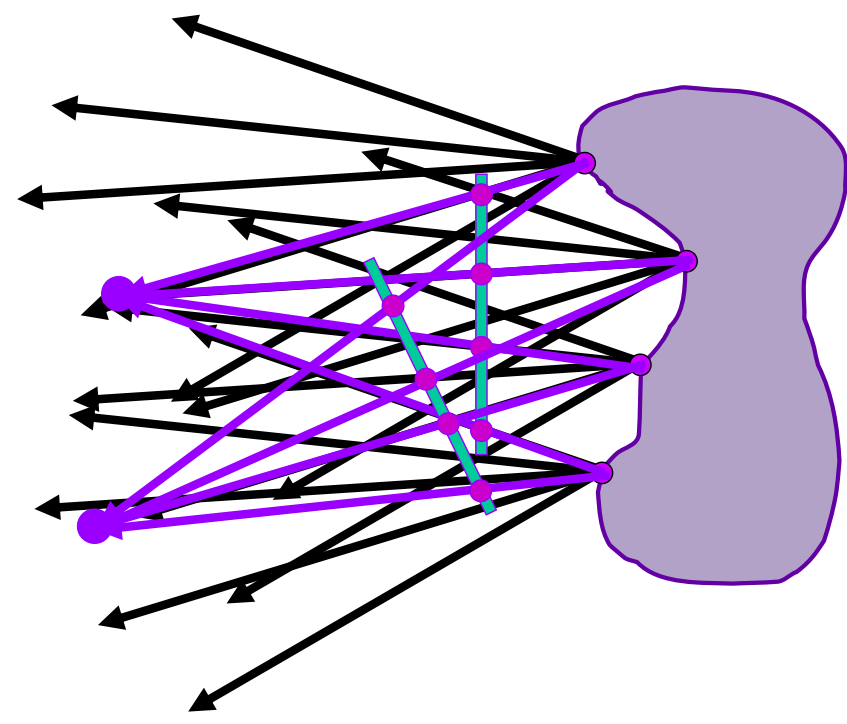
由全光函数可以知道世界中任意光线的分布,由一块幕布来模拟三维空间的思想给出了这样一种解决方式,想要描述一个物体的视觉信息,只要找出它的包围盒,并记录包围盒表面任意一点向任意方向的发光情况即可,光场就是在任意位置向任意方向的光照强度
知道光场后,从任意位置都可以看向这个物体,有了视点以及方向查询
而有了包围盒后,不需要知道物体的细节,只要记录包围盒表面的任何位置任何方向的光照信息即可
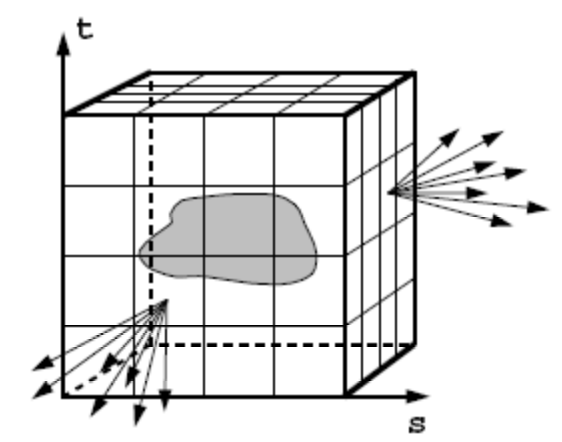
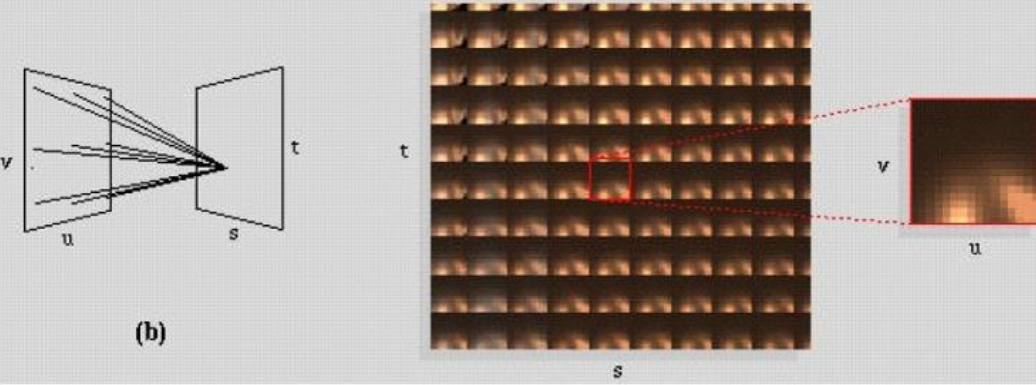
光场可以用
也可以定义两个相互平行的平面,只要连接两个点就可以确定唯一的一条光线,找到所有的uv和st的对应关系,便可以定义任意一条光线
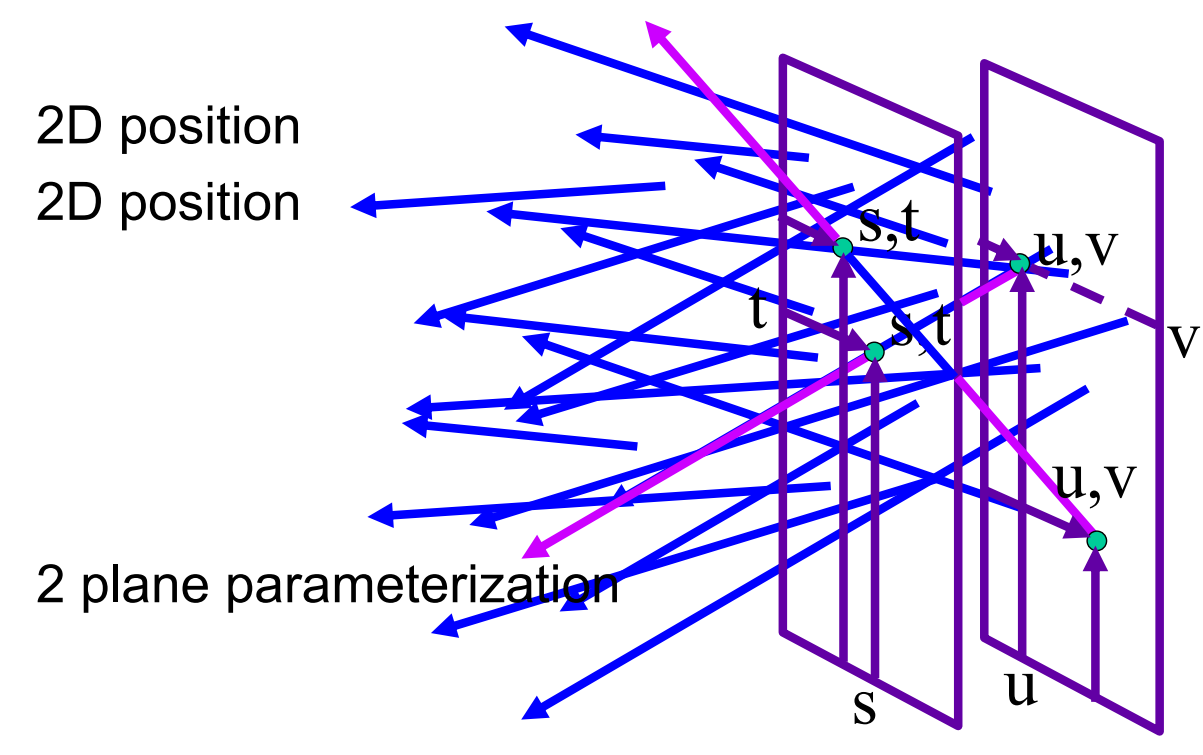
假设整个世界在st平面右边
从uv上一固定点向st平面上任意一点看,得到的就相当于在这个点放一个摄像机所得到的图集
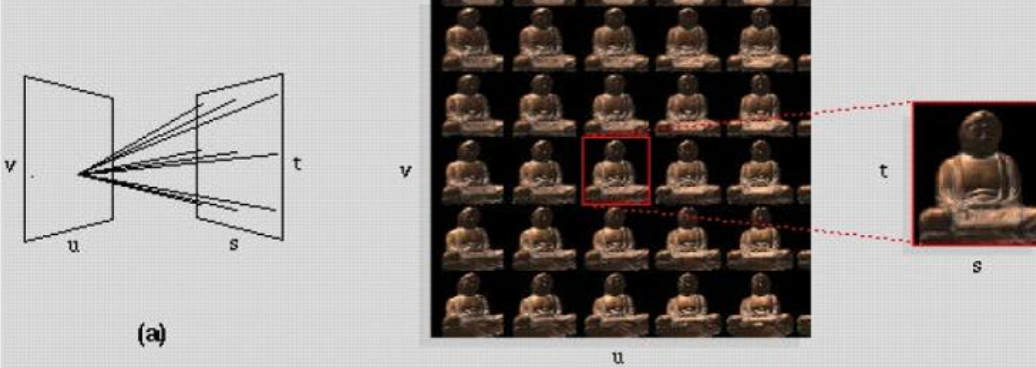
从uv上任意一点向st平面上一固定点看,得到的就是同一个物体在不同方向上所得到的结果
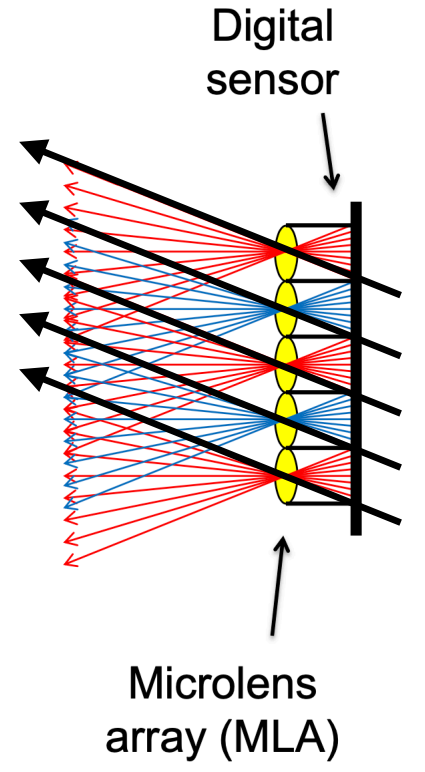
光场摄像机
基本原理:将像素替换成透镜,让透镜将来自不同方向的光分开然后记录下来
这种底片支持后期的重新聚焦
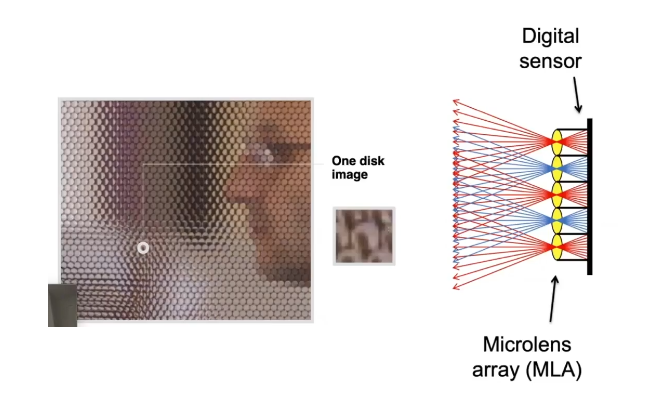
还原普通照片的方法:对于每个透镜都选择每一“块”的最底部的像素。
有了光场之后,可以虚拟移动相机的位置 ,而光场摄像机记录了所有的光场信息。
但是光场摄像机存在分辨率不足,高成本等问题
颜色
颜色本质上是人的一种感知,而不是光的某种物理属性,不同波长的光不是不同的颜色
颜色的物理学基础
不同的颜色对应着不同的吸收光谱
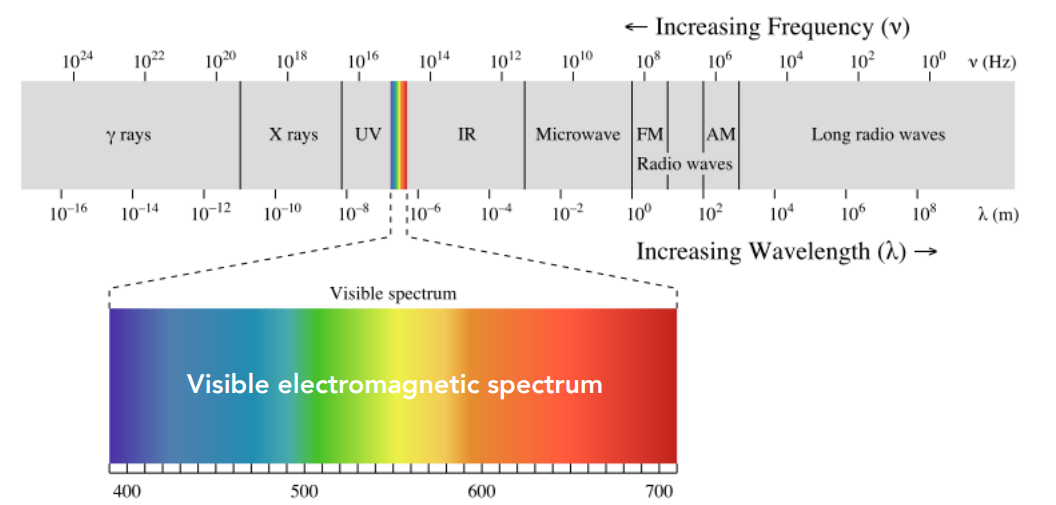
可见光的光谱
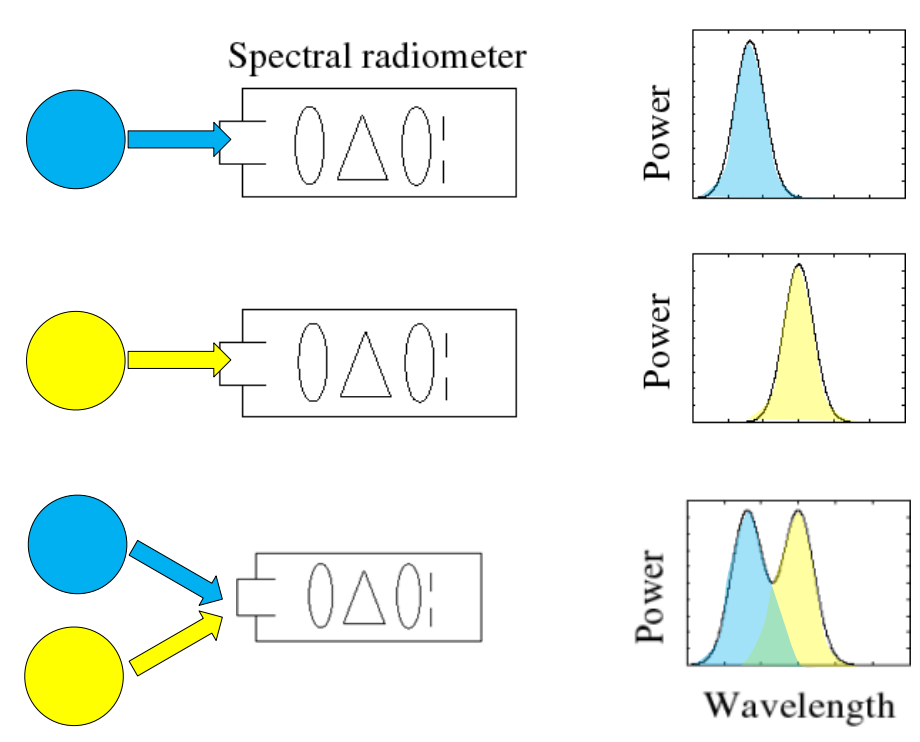
谱功率密度
谱功率密度(SPD)是光线不同波长的光强分布是多少,也即不同颜色的光对应的光强分布
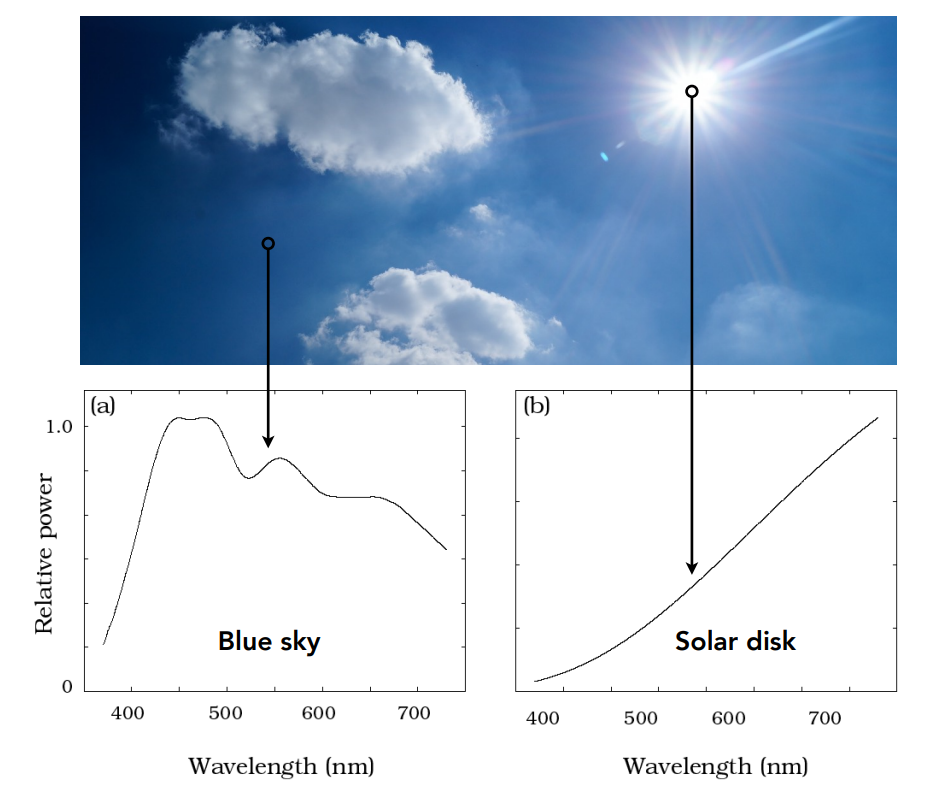
谱功率密度是度量光的重要属性,具有线性运算的性质
颜色的生物学基础
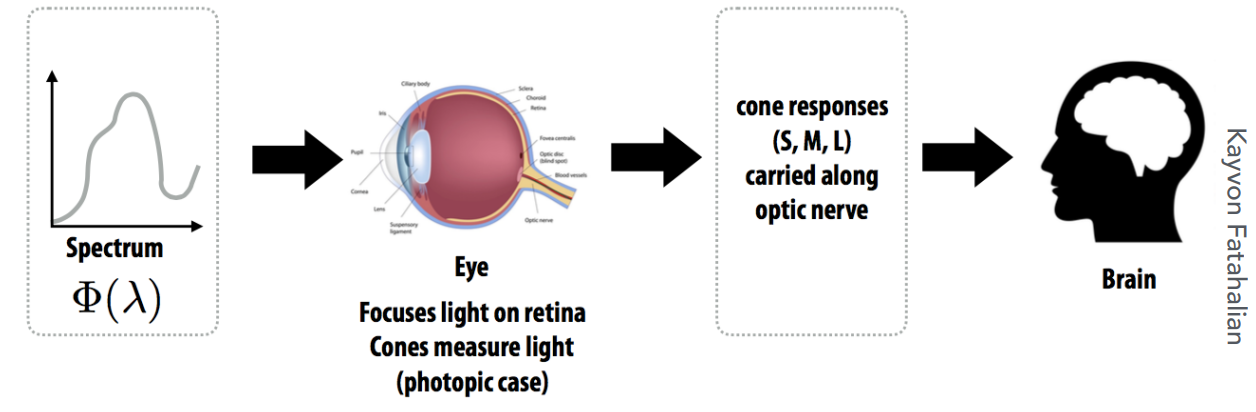
人的眼睛的构造与相机类似,而颜色这一感知就是在视网膜这一结构上形成的
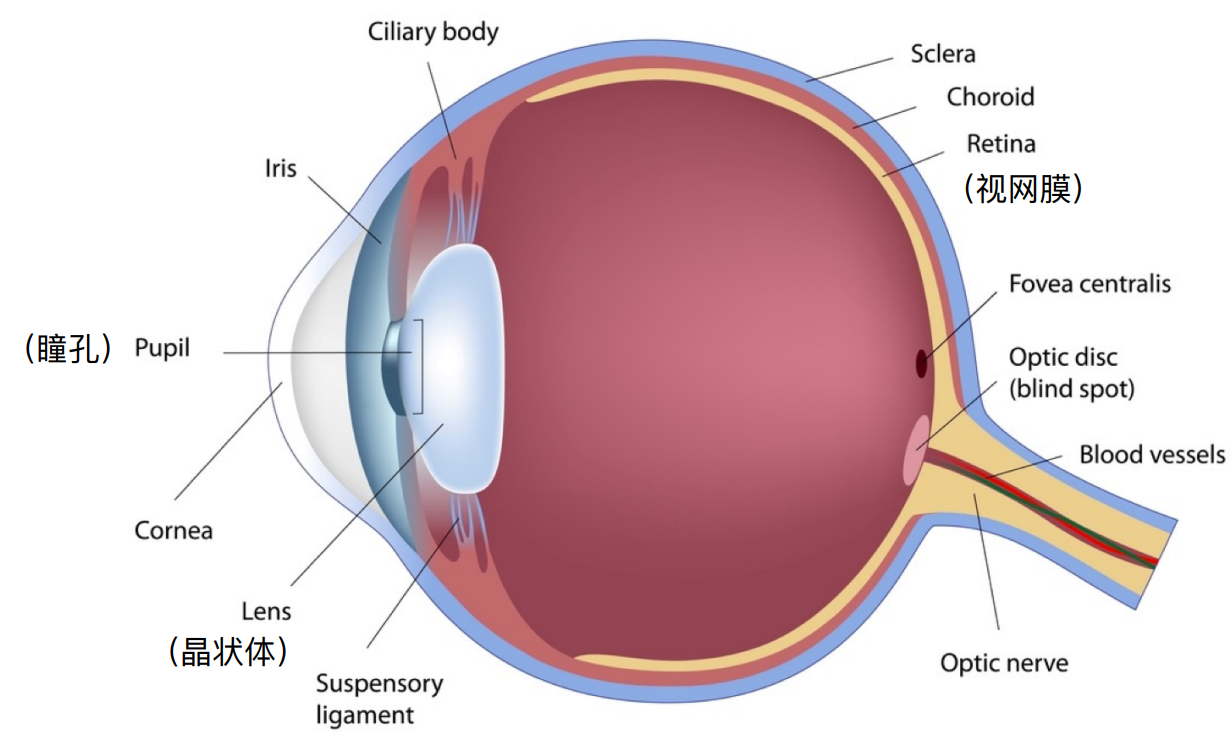
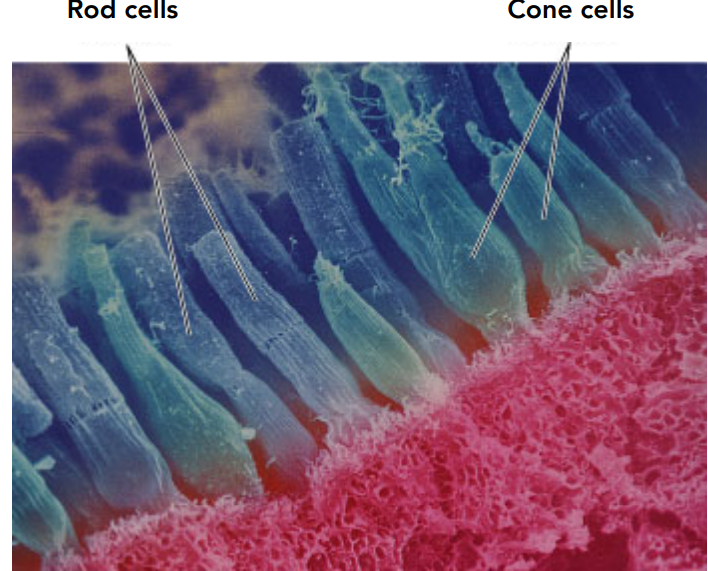
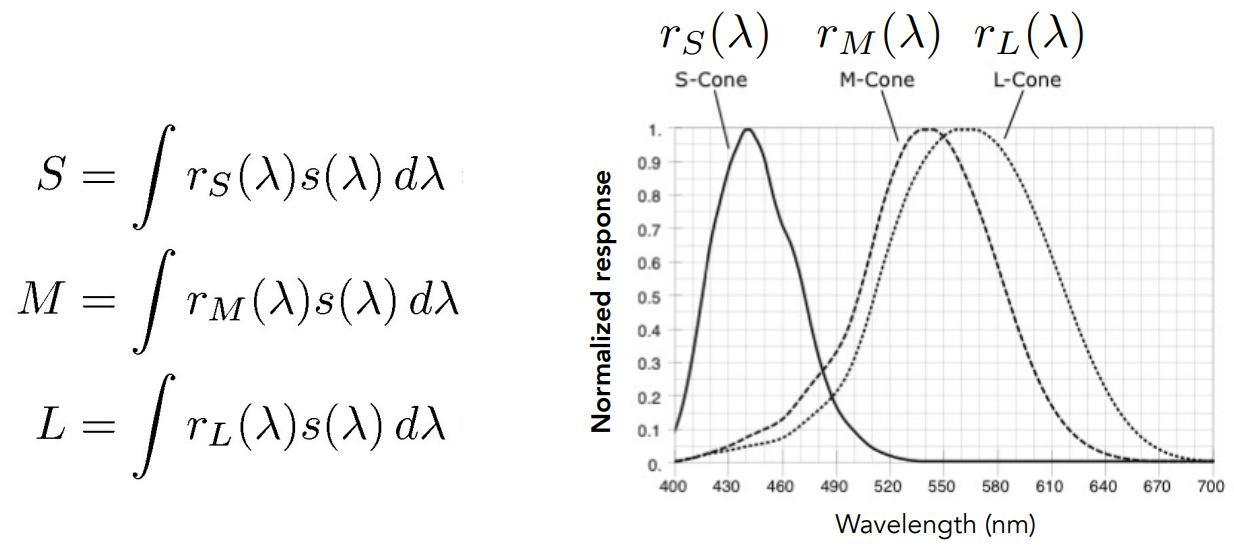
感光细胞
视网膜上有两种感光细胞:
- 视杆细胞:感知光的强度,得到一张灰度图
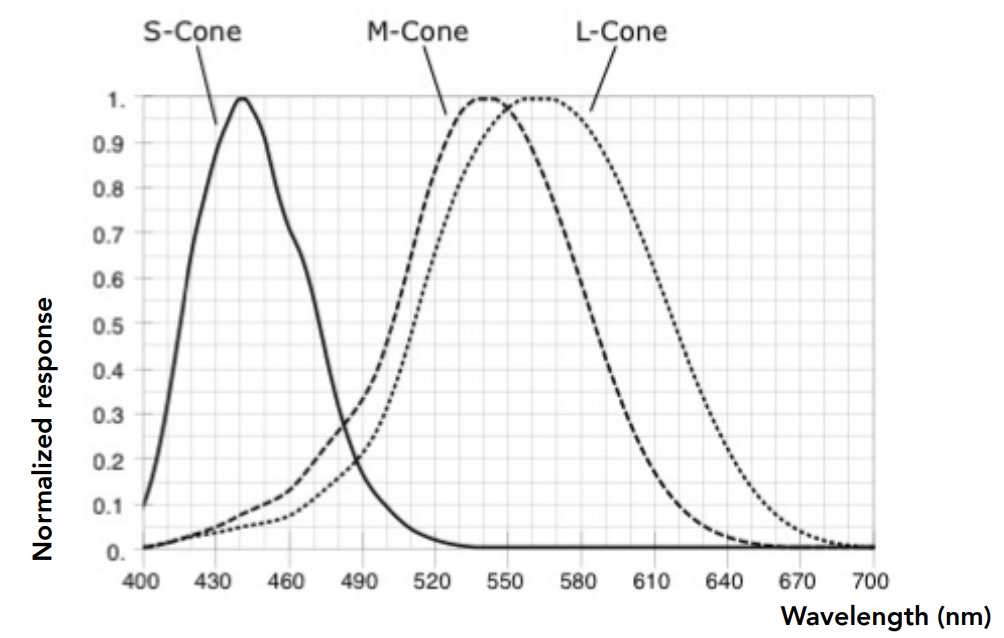
- 视锥细胞:感知光的颜色,有三种类型:S-Cone,M-Cone,L-Cone,对于不同波长的光反应不一样
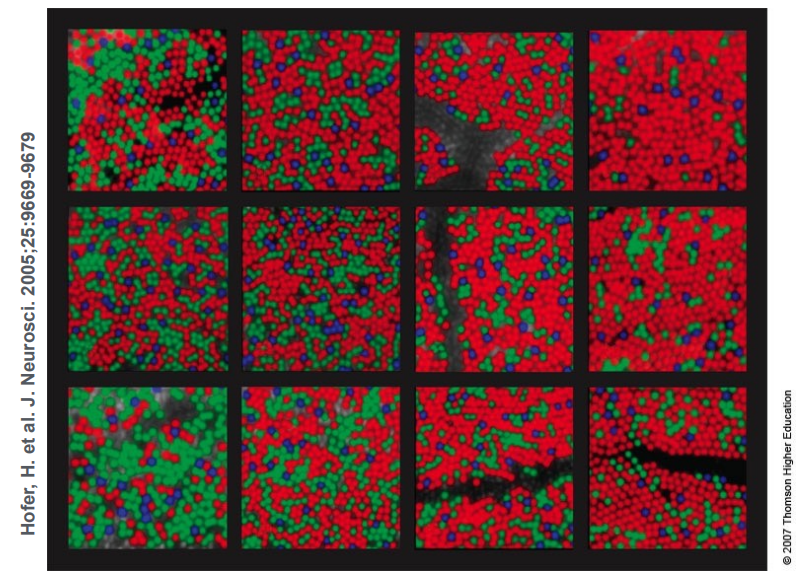
并且感光细胞存在极强的个体差异性,在不同人中分布不同
三色理论
三色理论提出人所看到的颜色,其实是由三个数所构成的,而不是具体的物体
每一个光的波长信息不能被人眼测量,也不能被大脑接受
而人眼在得到了SML这三个数后向大脑传输信号,使大脑获取这一信息,最终形成了颜色这一感知
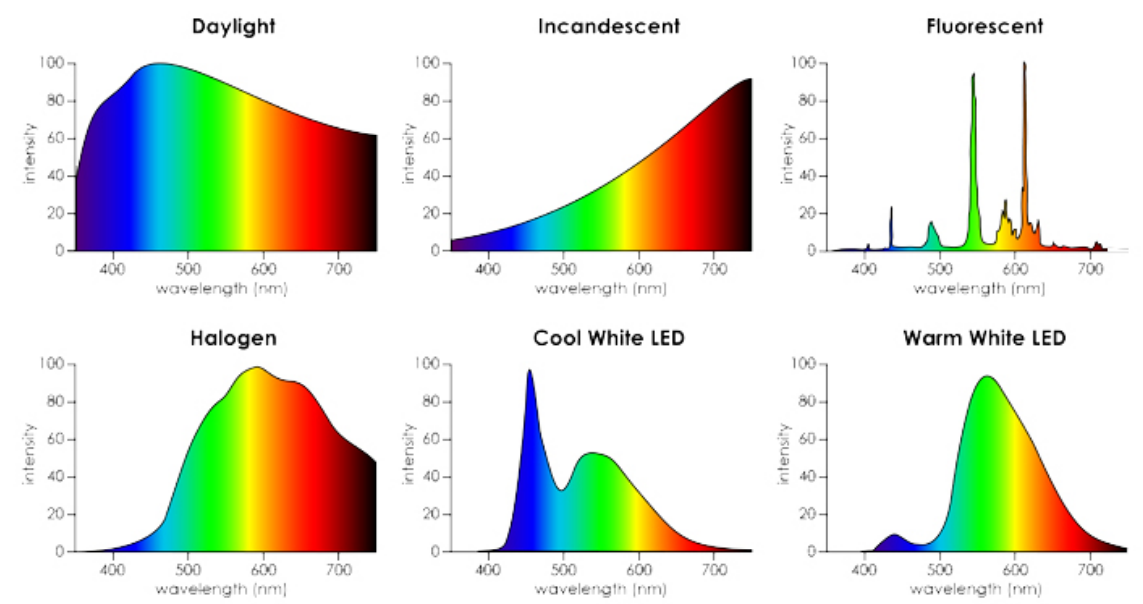
同色异谱
由于人所感知到的颜色实际上只是由3个数构成的,所以很有可能出现最后看到的色彩相同,但是光谱分布不同这样的情况,因此有时并不需要知道具体的光谱分布,而只需要通过不同波长的实验进行模拟即可
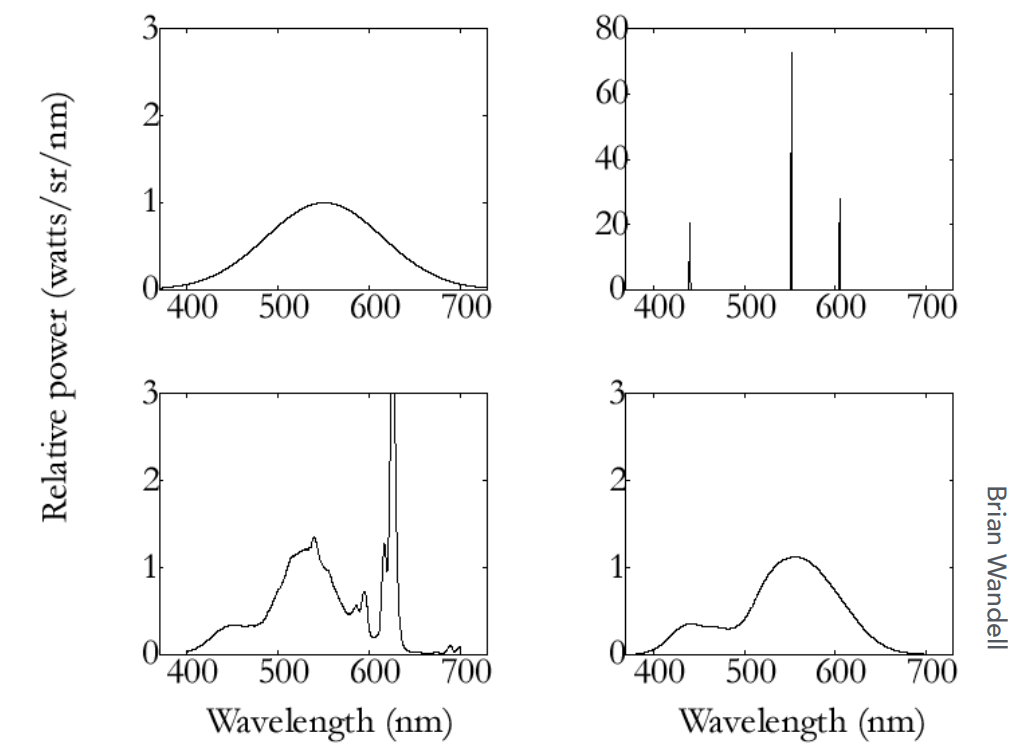
这四张光谱截然不同,但积分出来所得到的颜色却是相同的
颜色匹配
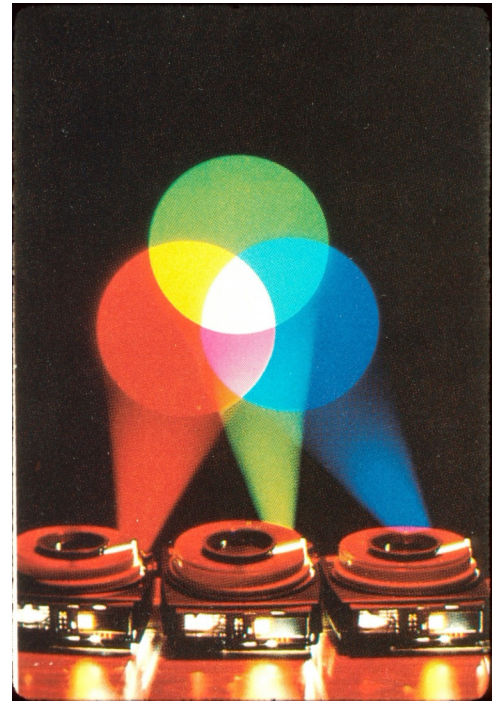
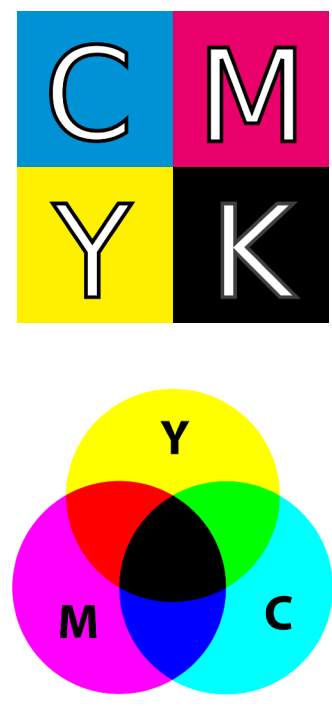
颜色匹配主要有两种系统:加色系统和减色系统
加色系统
减色系统
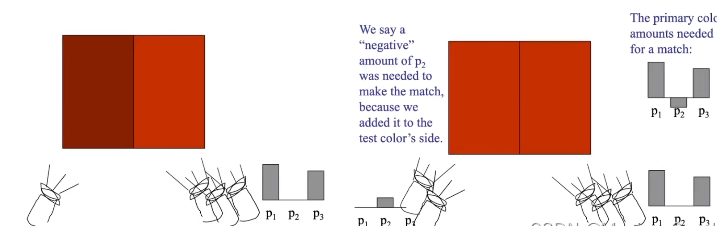
给定一组主要的光,调整这些光的亮度并将其混合在一起,最终用一组3个数RGB来描述

但是有的颜色加不出来,此时可以在原色上加色,相当于给调色减色,由此得到相同的颜色
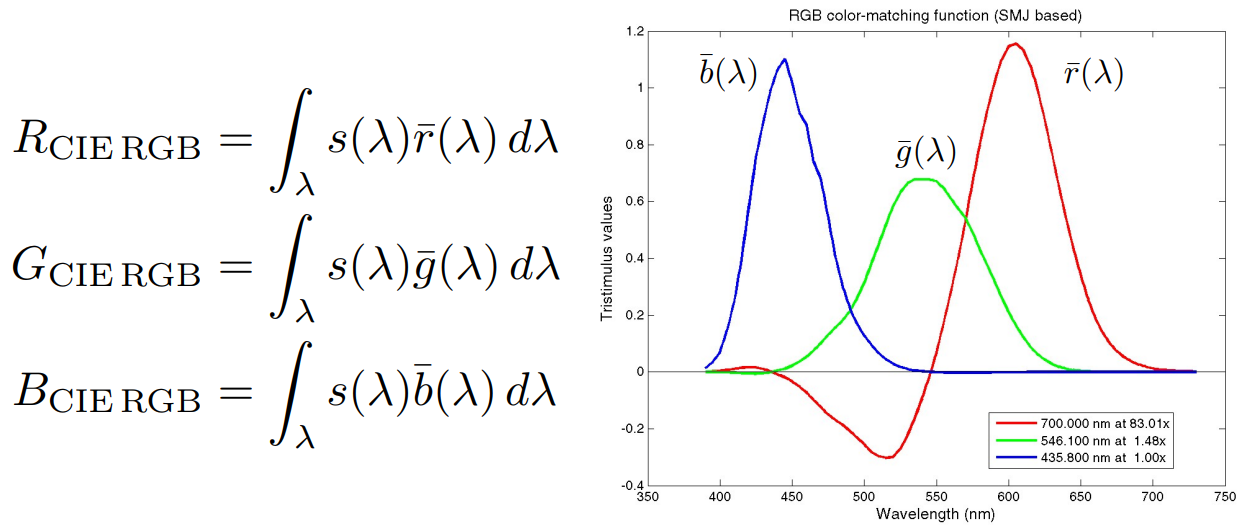
CIE RGB Color Matching
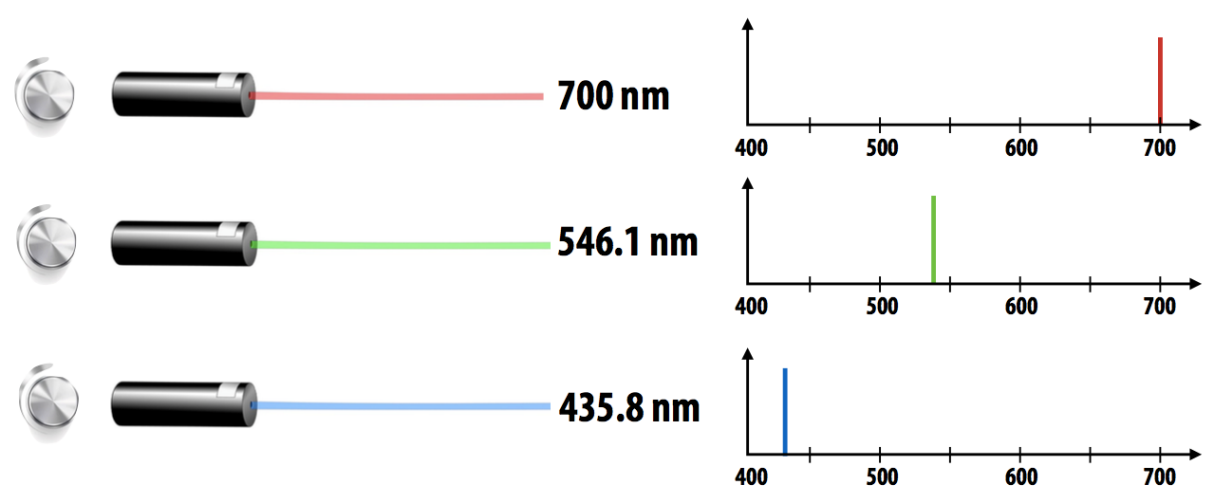
CIE RGB Color Matching Functions
即每个CIE RGB主要光匹配x轴上给定波长的单色光需要混合的量
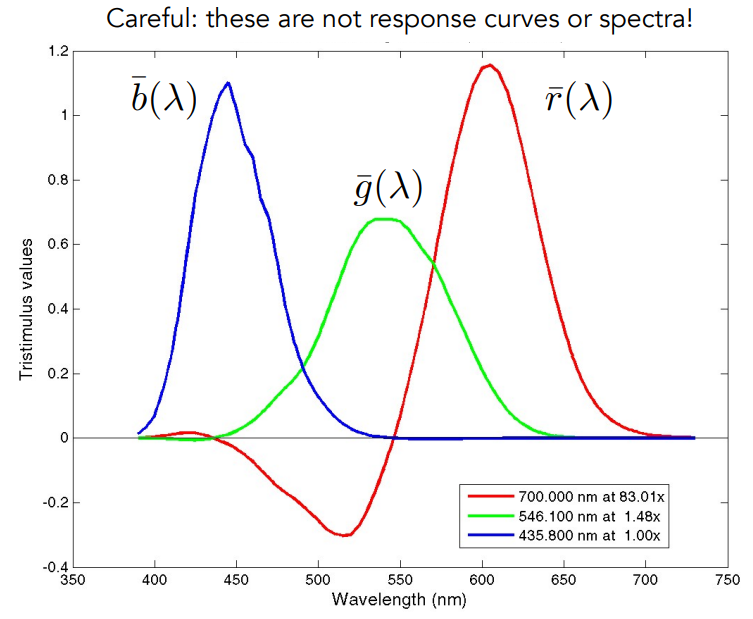
Color Reproduction with Matching Functions
对于任何一个光谱s,感知到的光被下面的公式匹配(缩放CIE RGB原色)
颜色空间
由不同的方法所生成的一系列颜色称为颜色空间
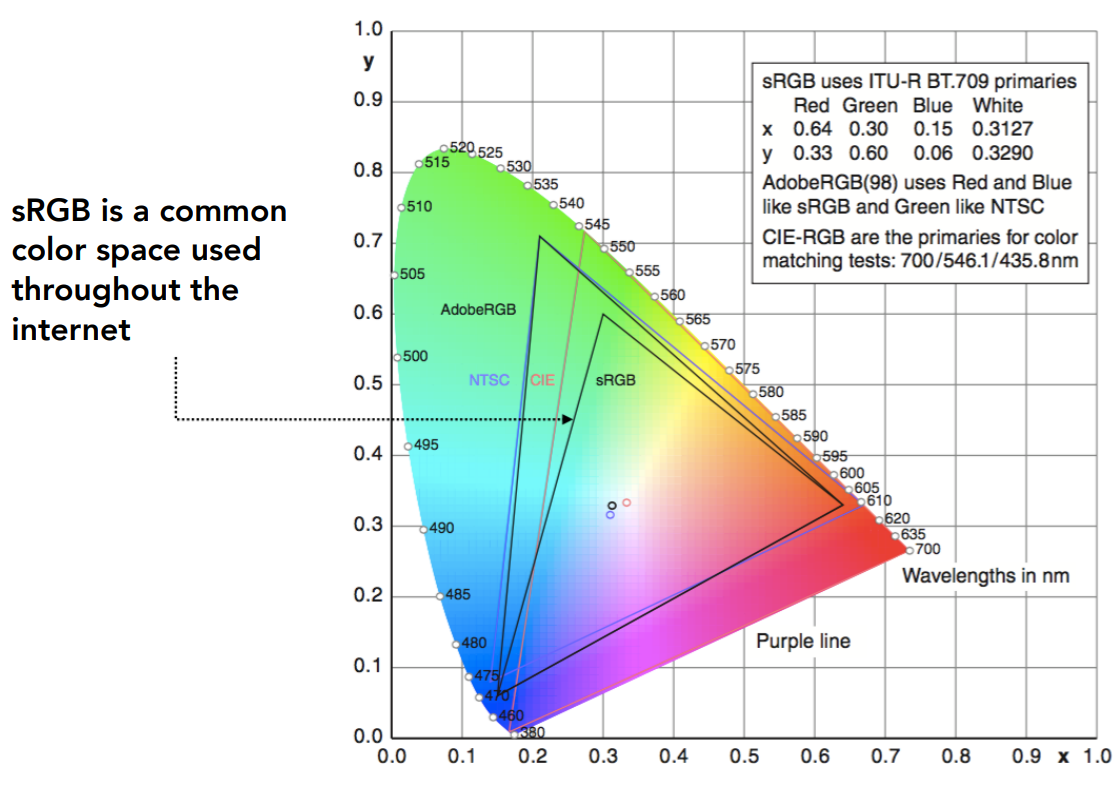
sRGB
sRGB:标准RGB空间,是最常见,最广泛的色彩空间,但是色域有限
CIE XYZ
CIE XYZ是一个人造的的颜色匹配系统,首先设定标准颜色原色组X,Y,Z
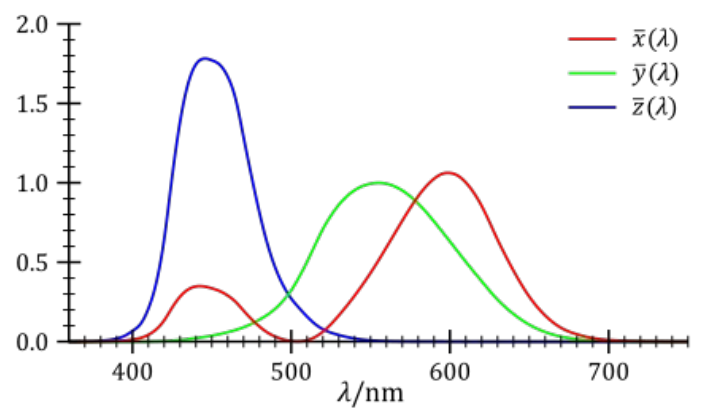
可以看出y的分布函数大致均匀且对称,因此可以将y视为一个特殊的表示亮度的常量
对X,Y,Z进行归一化,得到x,y,z
固定y,得到一张关于x,z的关系的函数图,在对应的位置填上对应的颜色,就得到一张色域图,表示所能表示出来的颜色
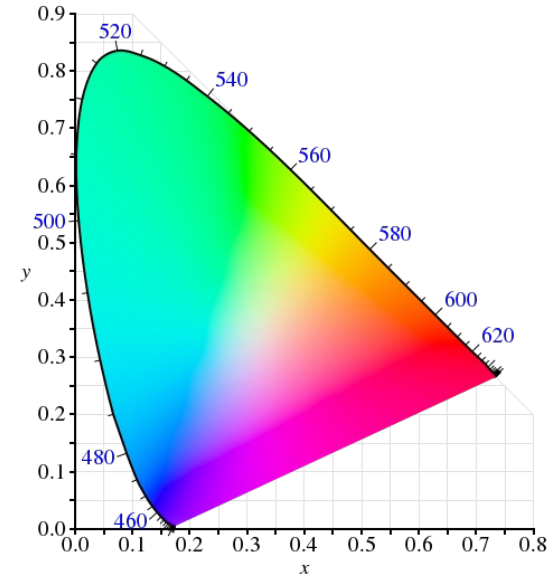
不同颜色空间所对应的色域
HSV颜色空间
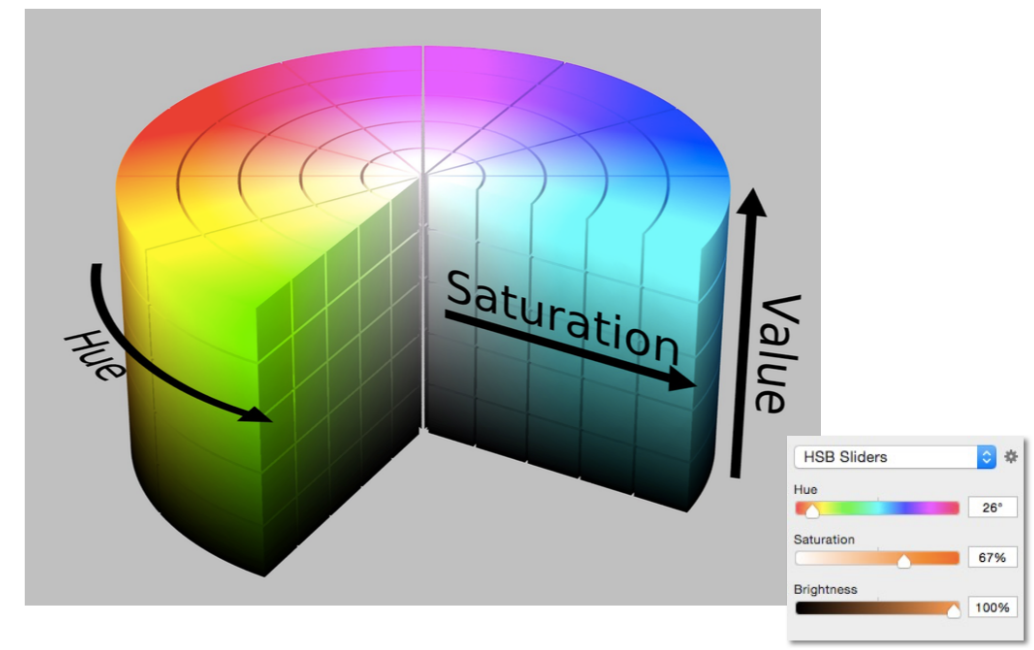
HSV颜色空间常见于拾色器中,方便调出需要的颜色:
- Hue:色调,不同类型的颜色
- Saturation:饱和度,更接近白色还是纯色
- Brightness:亮度,色彩的明暗程度
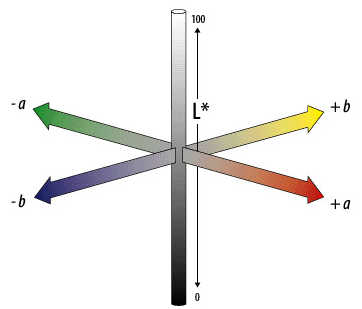
CIELAB Space(L*a*b)
利用了互补色和视觉暂留原理的一种颜色空间,以一对互补色为轴的两端进行表示
互补色:无法混合的两种颜色